Subsea Sheepdog Rounds Up the Facts
For modern oceanographers, a basic tool in the equipment lockers is a CDT--a device that measures the conductivity, temperature, and depth of the ocean water into which it is lowered. (The conductivity indicates how salty the water is.) Years ago, the only way to gather that information was by hanging a rosette of water-catching bottles on a sturdy wire, lowering the whole apparatus over the side of a research ship to the appropriate depths, and then winching the samples back up. In the deep ocean, that could take a lot of time, and scientists often couldn't be comfortably certain of the accuracy of their measurements.
More recently, the electronic revolution let oceanographers dangle remote-sensing devices overboard. With electrical pulses zipping back up the wires to computers in shipboard laboratories, researchers could have their data in real time (which is standard technical jargon meaning right now.) Yet they still had a device hanging straight down by a wire, which means they could gather data only in a very small area before they had to haul up the CTD, move to a new spot, and lower it again. It also meant that very little research could be done on the salinity, temperature, and depth of ice-covered oceans.
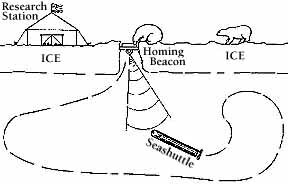
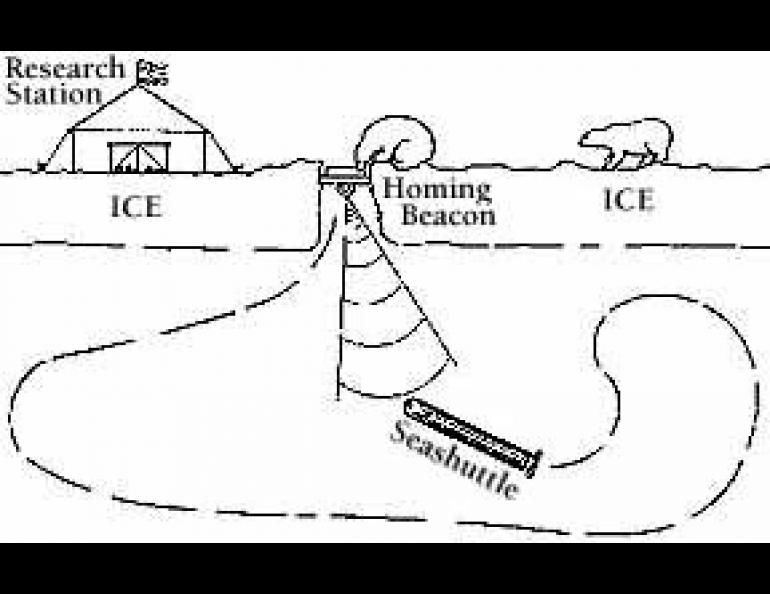
Now oceanographers and engineers at the University of Washington's Applied Physics Laboratory have come up with a way around the wire-imposed limits. They're planning to send a CTD on an under-ice mission aboard a free-swimming torpedo-shaped robot called the Seashuttle.
Seashuttle is only four feet long and weighs sixteen pounds on dry land. Its compact size makes it easy to handle, but it can easily carry enough electronic gear to measure and record the required information and to follow a programmed one-by-one kilometer square course. Like an undersea sheepdog, it will range around the ocean, looking for facts instead of strays. When its course is completed, Seashuttle follows a homing beacon to a pickup point. Its programming tells it to turn around if the beacon is getting farther away, and to follow a set of circular search patterns if it loses the beacon signal entirely.
Since the engineers designing the robot are well aware that things will go wrong if they can, they've built in a final precaution. If the Seashuttle still can't find its beacon after a preset time, it shuts down to save its batteries and begins to broadcast an acoustic signal. It's as if a lost sheepdog sat down and started barking so the shepherd could find it.
The Seashuttle was adapted from a minitorpedo originally developed by the Applied Physics Laboratory as a sonar training target for the Navy. Its development was funded by the Navy and by the Washington Sea Grant Program.
So far, the little robot has been tested only in Lake Washington. There it performed very well, holding to its programmed depth and heading, and returning so accurately that it bumped into the anchor line holding its homing beacon. The Seashuttle meets its first severe challenge early next year, when scientists in the high Arctic north of Norway will send it under the ice to survey part of the Arctic Ocean.
Before it goes under the ice--again like a dog--it will get a little more training. Seashuttle navigates by compass, and compasses are notoriously unreliable in the far north. The design team has been working to overcome any problems this might pose for their robot by developing a method where they give the Seashuttle's computer the desired directions by putting it through a dry run first. Above water, they turn the device in the ways it is to go, in effect teaching its computer brain to remember the correct paths.
Since University of Washington oceanographers often work on joint projects with their University of Alaska Fairbanks colleagues, it's probably only a matter of time before the Bering, Chukchi, and Beaufort seas on this side of the Arctic are visited and investigated by this clever underwater robot that looks like a torpedo but behaves more like a sheepdog.